今天对一个书的模型加Rigidbody,
MeshiCollider用的是mesh非UNITY自带的
出现
Non-convex MeshCollider with non-kinematic Rigidbody is no longer supported in Unity 5.
并且碰撞不起作用
在面板中
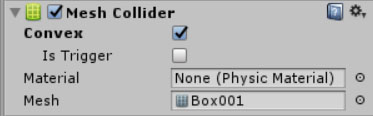
勾选了convex就解决了
去官网一查
| Convex | If enabled, this Mesh Collider will collide with other Mesh Colliders. Convex Mesh Colliders are limited to 255 triangles. |
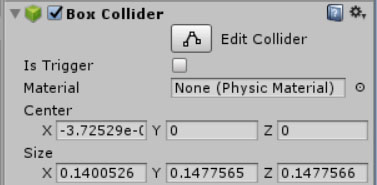
如果是BOX Collider则没这个选项
posted on 2016-12-02 10:41 阅读(...) 评论(...)